Hello friends,
To bring new live into this discussion, I made an overview of what I think are the options to have multiple Velbus system linked.
My challenge
I would like to have some Velbus modules in my garage
Concept 1 - long cable
Installing a cable straight through the backyard is not an option.
Concept 2 - ESP32 modules to connect buses
This is the solution I was planning to develop. But quite a challenge. Because the 2 Velbuses are no longer connected on electrical level, there will be multiple messages on the buses at the same time. The “ESP” interfaces will have to buffer a lot of data. Especially for bus scans (255 messages) and read/write to/from modules. Major benefit: operation not depending on a Raspberry pi (which can fail, corrupt SSD, etc).
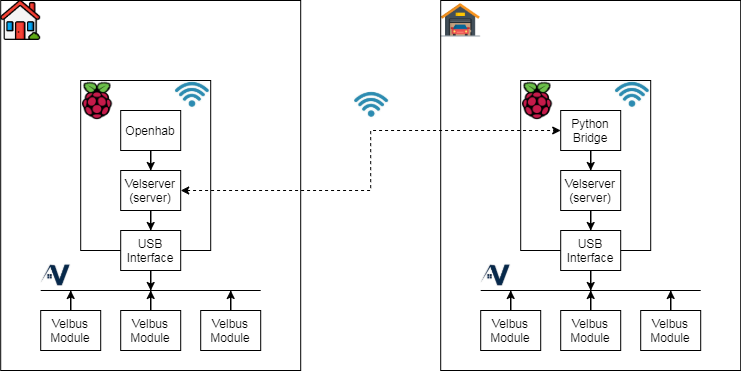
Concept 3 - Velserv in server & client modes
Use Velserv in Server-Client modes. This would link the buses at a “driver” level (not really driver level, but rather low level on the RPI. But does require a raspberry RPI in my garage. But, a crash of OpenHab will not endanger my bus performance (and that is a very important WAF (Wife Acceptance Factor).
A Pi-Zero of Nano-Pi with bare minimum install could do the trick and probably provide a few years of stable operation.
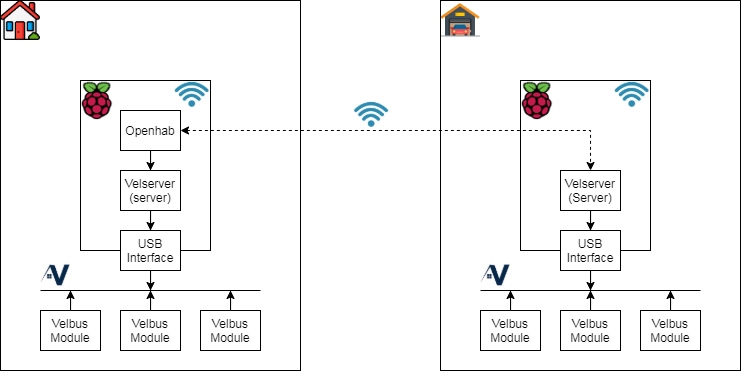
Concept 4 - Linking by Openhab
Variation on concept 3. Just let Openhab do the linking of the 2 buses. So basically 2 separate buses.
Concept 5 - Hardware TCP-Serial interface
I found an “hardware” TCP-Serial interface module which I connected to my own “Velbus serial interface”. OpenHab then connects to the TCP port of this module. Actually, that worked better than expected.
Status
So far I did test #5. That works.
So far I did test #4. That works.
I would like to test #3, because in theory, it would result in 1 Velbus and Velbuslink should be able to detect all modules of both the house and the garage. Just need to find some time. #2 will take a lot of time and effort and is on hold for now.
BUT, how many signals do I really need from the garage in my house Velbus? 1 or 2 (or none, has been working smooth for 5 years now). It is just for convenience to check the lights are out and the garage door is closed.
Greetings Matthijs